DINÁMICO
Creado
13 Nov 2007
Actualizado
12 Nov 2010
QUÉ ES EL RANGO DINÁMICO
El rango dinámico es un concepto físico aplicable a cualquier señal que varíe en función de una determinada variable independiente, y mide la relación existente entre los valores máximo y mínimo que la amplitud de dicha señal adquiere para todo el conjunto de posibles valores de la variable de la que depende.Por ejemplo, aplicado a una señal acústica consistente en una vibración que se propaga por el aire u otro medio en forma de diferencias de presión, el rango dinámico vendrá dado por la relación de amplitudes máxima y mínima que alcanzan las sobrepresiones generadas por dicho sonido en su desplazamiento. El sonido es una magnitud que varía con el tiempo por lo cual ésta es la variable de la que depende.
Hablando del sistema captor, diremos que el rango dinámico de nuestro oido será la relación entre la máxima y la mínima amplitud sonora que podamos registrar con fidelidad. Una amplitud inferior a la mínima (susurro) no será perceptible por nuestro sistema auditivo. Del mismo modo una amplitud que supere nuestro umbral de audición (fuerte sonido) irá más allá de una experiencia puramente auditiva y vendrá acompañada de dolor.
En el caso que nos ocupa de la imagen, la señal es una intensidad luminosa y la variable de la que depende será la localización espacial de la misma, regida por unas coordenadas sobre un plano (sensor), unas coordenadas angulares (escena), o cualquier otra referencia espacial. El rango dinámico de una escena consistirá en la relación existente entre la mayor y la menor luminosidad que aparezcan en la misma.
Y siguiendo la analogía con el sistema captor del sonido, el rango dinámico de un sensor vendrá dado por la relación entre la máxima exposición que dicho sensor sea capaz de captar antes de saturarse, y la mínima luminosidad que puede registrar con detalle en las sombras. Este segundo aspecto en la determinación del rango dinámico es mucho más complicado de delimitar ya que depende de nuestra consideración sobre el ruido en el sensor como veremos más adelante.
El rango dinámico se expresa de forma relativa como el cociente entre las amplitudes máxima y mínima que alcanza la señal. De ese modo se constituirá como una magnitud adimensional que simplemente vendrá a indicarnos, en el caso de una señal luminosa por ejemplo, cuánto mayor es la luminosidad máxima de la imagen o escena respecto a la menor luminosidad presente en la misma. Veamos cómo lo podemos representar numéricamente.
EXPRESIÓN LINEAL DEL RANGO DINÁMICO
Imaginemos una imagen o escena cuya región más luminosa (altas luces) tiene un nivel o intensidad 10000 veces mayor que la región menos luminosa de la misma (sombras profundas). Entre ambas habrá una relación lineal de luminosidades de 10000 a 1, es decir, un rango dinámico de 10000. Y es correcto expresarlo con dicha cifra en escala lineal.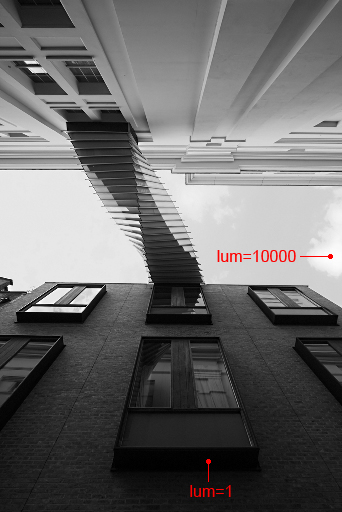
Fig. 1 Relación de luminosidades máxima y mínima de una escena.
Al concepto de rango dinámico se refiere en ocasiones como una relación de contraste, que en la anterior escena se expresaría como de 10000:1, y viene a decir lo que ya sabíamos: la región de mayor luminosidad de la imagen es 10000 veces más luminosa que la región de menor luminosidad.
Sin embargo estas cifras lineales no son prácticas debido a su gran magnitud resultando además poco descriptivas. Por ello se suele recurrir a escalas más manejables y a la vez acordes a la respuesta del propio ojo humano.
EXPRESIÓN LOGARÍTMICA DEL RANGO DINÁMICO
Surge así un tipo de representación comprimida del rango dinámico en escala logarítmica, mucho más intuitiva y en el caso que nos ocupa directamente relacionada con el mundo de la fotografía: los pasos de diafragma también denominados EV (Exposure Value).Cómo se convierte un valor de rango dinámico lineal a EV? es muy sencillo, basta para ello echar mano del concepto de paso de diafragma: diferencia de valores de luminosidad donde uno es el doble de luminoso que el otro. Así para convertir una medida lineal de rango dinámico en diafragmas basta calcular el logaritmo en base 2 de la medida lineal:
Como el logaritmo en una base A cualquiera puede expresarse en función del logaritmo en cualquier otra base B con la expresión logA(x) = logB(x) / logB(A), la fórmula de conversión vista podremos calcularla en función del logaritmo natural (neperiano) o del logaritmo en base 10 del modo siguiente:
Aplicando estas fórmulas al ejemplo anteriormente visto podemos calcular un rango dinámico de ln(10000)/ln(2) = 13,29EV ó 13,29 diafragmas.
En este tipo de unidades sabemos que subir un paso de diafragma (+1EV) equivale a duplicar la luminosidad, mientras que bajar un paso (-1EV) implica pasar a la mitad de la luminosidad original, percibiendo el ojo humano cualquiera de estos dos incrementos como de la misma magnitud. Sin embargo en escala lineal estaríamos hablando de luminosidades con relaciones 2, 4 y 1 respectivamente, que podrían llevar a pensar que duplicar la luminosidad (pasar de 2 a 4) debiera resultar perceptivamente más notorio que dividirla entre dos (pasar de 2 a 1) cuando no es así.
Aunque es mucho menos habitual, también es totalmente posible emplear una representación más ingenieril del rango dinámico (en realidad aplicable a cualquier unidad relativa y por tanto adimensional) que son los decibelios (dB). Una relación de potencias luminosas se representa en términos de tensión con un factor 20 mediante la expresión:
Que de nuevo aplicado a nuestro ejemplo de rango dinámico 10000 arrojaría una cifra de 20*log10(10000) = 80dB.
Al ser ambas (EV y dB) unidades logarítmicas, puede establecerse una correspondencia rápida entre ellas:
Así por ejemplo un rango dinámico de 10EV corresponderá aprox. a 60dB.
Recopilando las distintas medidas del ejemplo, el rango dinámico de la escena podría expresarse indistintamente como:
Fig. 2 Distintas formas de expresar el rango dinámico.
LÍMITES DEL RANGO DINÁMICO DEL SENSOR
Ahora que ya hemos visto el concepto genérico de rango dinámico como diferencia de luminosidades, vamos a ver qué lo define en el sensor, es decir, qué da lugar a que el rango dinámico que es capaz de captar nuestro sensor sea reducido.Por el extremo superior está claro que el rango dinámico del sensor vendrá limitado por la saturación del mismo. Como cualquier dispositivo electrónico, en la zona inmediatamente previa a la saturación el sensor empieza a tener ciertos comportamientos alineales.
Pero esta zona de comportamiento indeseado es tan reducida en términos de rango dinámico, y la información que una escena depositará normalmente en ella es tan limitada, que es una buena aproximación considear que el límite superior utilizable del sensor es la propia saturación.
Sin embargo queda delimitar las prestaciones del sensor en el extremo contrario, es decir las sombras, lugar en el que nos encontramos con dos parámetros determinantes: el número de bits en que se codifica el archivo RAW y el ruido.
LIMITACIÓN DEBIDA AL NÚMERO DE BITS DEL ACHIVO RAW
El sensor es un dispositivo que presenta una gran linealidad como se estudia en Fotografía analógica vs digital. Esto quiere decir que si ante un estímulo de luminosidad determinada el sensor genera un nivel digital dado, cuando el estímulo luminoso se reduce a la mitad lo hará también el nivel generado por el sensor.Por otro lado el sensor codifica las señales luminosas en valores de N bits, lo que da lugar a un rango limitado de posibles niveles enteros para representar cada nivel de luminosidad recibida. Por ejemplo para sensores de 12 bits el número de niveles lineales disponibles será como mucho de 212=4096, dando lugar así a un rango de 0..4095.
Con los ingredientes que tenemos (linealidad y bits) es posible calcular cuántos diafragmas van a poder entrar en el rango dinámico del sensor así como el número de niveles que van a dedicarse a codificar cada uno de dichos diafragmas.
El nivel máximo de señal admisible generará en el caso más favorable un nivel 4095. Si ahora reducimos en 1EV la exposición, por la relación lineal expresada anteriormente el límite inferior de este diafragma superior caerá en el nivel mitad del máximo, es decir en el nivel 2048. Si subexponemos 1EV adicional tendremos que el límite inferior del segundo diafragma será la mitad de ese valor, es decir 1024. Y así sucesivamente hasta tener asignado un rango de niveles para cada uno de los diafragmas resultando la siguiente distribución:
0EV (1er diafragma): 2048 niveles, 2048..4095
-1EV (2º diafragma): 1024 niveles, 1024..2047
-2EV (3er diafragma): 512 niveles, 512..1023
-3EV (4º diafragma): 256 niveles, 256..511
-4EV (5º diafragma): 128 niveles, 128..255
-5EV (6º diafragma): 64 niveles, 64..127
-6EV (7º diafragma): 32 niveles, 32..63
-7EV (8º diafragma): 16 niveles, 16..31
-8EV (9º diafragma): 8 niveles, 8..15
-9EV (10º diafragma): 4 niveles, 4..7
-10EV (11º diafragma): 2 niveles, 2..3
-11EV (12º diafragma): 1 nivel, 1
Como puede verse el rango de 12 bits es capaz de albergar un total de 12 diafragmas. Generalizando un sensor de N bits podrá registrar en una codificación lineal un máximo de N diafragmas. El rango dinámico que es capaz de codificar un sensor tiene por lo tanto un límite físico infranqueable de tantos diafragmas como bits codifiquen sus archivos RAW (12, 14, 16,...).
Sería correcto entonces afirmar que el rango dinámico de un sensor digital equivale al número de bits que contienen sus archivos RAW? no, en absoluto es así. Y esto es debido la insuficiencia de niveles con que son representados los diafragmas más bajos.
En efecto, este hecho ya podía intuirse en la distribución de niveles anterior donde en color rojo se destacaba la escasa cantidad de niveles tonales disponibles para representar los diafragmas inferiores de la escena: desde 8 niveles para el 9º diafragma (-8EV) hasta un único nivel para el 12º diafragma (-11EV). Esta escasez de niveles conduciría a problemas de posterización en las sombras en el caso de empeñarnos en usarlos para albergar información útil.
No hay un criterio definido que determine la cantidad de tonos necesarios en la representación de un diafragma dado para no mostrar posterización, entre otras cosas porque ello dependerá del nivel de brillo y contraste con que aparezca dicho diafragma en la imagen final postprocesada. Como criterio subjetivo propuesto consideraremos que 16 niveles tonales por diafragma es el mínimo exigible para tener una calidad de representación suficiente en estos diafragmas inferiores.
Según este baremo los 4 diafragmas más bajos de cualquier codificación lineal no dispondrían de una variedad tonal suficiente para codificar la información por lo que una cámara con N bits en sus archivos RAW tendría un rango dinámico máximo por este concepto de N-4 diafragmas. Así una cámara de 12 bits dispondría de 8 diafragmas, una cámara de 14 bits de 10 diafragmas y una cámara de 16 bits de 12 diafragmas.
Estas cifras son menores a las apuntadas antes, pero son correctas para determinar el rango dinámico del sensor? de nuevo no es así, siguen siendo unas apreciaciones demasiado optimistas. Y el motivo de ello es que existe una limitación para el rango dinámico que en general va a ser superior a la introducida por los bits del archivo RAW. Se trata del ruido en las sombras.
Hay que pensar además que el criterio elegido es conservador porque en las anteriores distribuciones estamos hablando en todo momento de niveles captados por el sensor. En sensores Bayer, que es la amplia mayoría, las 2/3 partes de los niveles no son captados sino interpolados a partir del 1/3 restante de niveles verdaderamente captados, lo que da lugar a una mayor cantidad de posibles niveles por diafragma para ellos pues la interpolación se realiza en un rango de 16 bits.
En concreto un sensor de 12 bits dispondrá para las muestras interpoladas de 2(16-12)=16 veces más niveles, y uno de 14 bits de 2(16-14)=4 veces más niveles en cada diafragma que los mostrados arriba. Esto no aporta ninguna mejora de precisión tonal pues no dejan de ser niveles interpolados, pero sí añade variedad tonal haciendo que la limitación del número de bits en el sensor sea todavía menos determinante a la hora de limitar el rango dinámico en cuanto a los problemas de posterización.
LIMITACIÓN DEBIDA AL RUIDO
Una característica típica de los sensores digitales es la de captar la imagen con una peor relación señal a ruido cuanto menor es el grado de exposición. En una escena de un rango dinámico determinado, las partes del sensor correspondientes a las zonas más oscuras de la misma resultarán con una exposición menor, y por lo tanto con una peor relación señal a ruido.Cuando se hace lo bastante grande en relación a la señal, este ruido enmascara la imagen útil destruyendo las texturas que en realidad queríamos captar. Es precisamente esta destrucción de texturas o interferencia del ruido en las sombras la que delimita el rango dinámico útil del sensor en los diafragmas bajos (en los diafragmas altos como ya acordamos el único límite es la saturación).
En el último apartado veremos una manera objetiva de medir la relación señal a ruido en el sensor, lo que asumiendo unos determinados umbrales de ruido admisibles arrojará una cifra objetiva y comparable de rango dinámico para un sensor dado.
Aquí sin embargo haremos un análisis más cualitativo donde pueda observarse la degradación creciente de la imagen que supone la aparición de ruido conforme nos aproximamos a los diafragmas inferiores del sensor.
Para ello haremos uso de una escena de alto rango dinámico que asegurará que existan partes del sensor con grados de exposición correspondientes a todos los posibles diafragmas de interés. El aspecto de la escena sin ningún tipo de procesado es el siguiente:

Fig. 3 Escena de alto rango dinámico.
La imagen no está subexpuesta, es así de oscura debido a su gran rango dinámico. Si la hubiéramos expuesto más habríamos empezado a quemar áreas importantes de las altas luces. De hecho analizando mediante Histogrammar su histograma logarítmico por diafragmas obtenemos la siguiente distribución:
Fig. 4 Histograma por diafragmas de la escena.
Donde puede verse que alguna zona sí se nos llegó a quemar; se trata de la parte superior de la ventana abierta. Sobre el histograma se constata que se trata de una escena de unos 11 ó 12 diafragmas de rango dinámico pues contiene información repartida desde las mencionadas zonas quemadas hasta sombras muy profundas correspondientes a los diafragmas -10EV y -11EV.
Los diafragmas más bajos de la gráfica presentan un nivel grande de oscilaciones lo que ya hace prever una cantidad de ruido importante en los mismos.
Analizando una porción de la escena donde nos sea fácil seguir en el Sistema de Zonas a qué diafragma corresponde cada área, tenemos la siguiente distribución lumínica:

Fig. 5 Zonas diafragmáticas de la escena.
De nuevo otro indicio presagia un nivel de ruido creciente conforme nos adentramos en los diafragmas más bajos, y es el nivel de granularidad de las fronteras entre los distintos diafragmas. Cuanto más nos acercamos a las sombras peor definidos están los bordes de las zonas lumínicas debido a que el ruido, que alcanza en estas zonas valores comparables o incluso superiores a los de la señal útil, hace "saltar" un mayor número de píxels a diafragmas que no son los que les corresponderían de acuerdo a la escena.
Hagamos ahora un análisis visual del ruido en cada uno de los diafragmas. El archivo RAW ha sido revelado sin ningún tipo de reducción de ruido para constatar de manera fiel la presencia o no del mismo. Y la imagen se ha procesado con una capa de ajuste de curvas para salvar el fuerte gradiente de luminosidad y hacer simultáneamente visibles todos los diafragmas con un nivel de brillo comparable. El reescalado se ha hecho por nearest neighbour para preservar íntegra la relación señal a ruido.
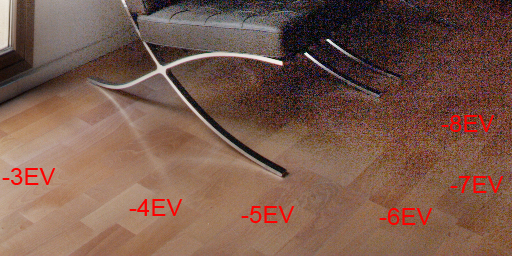
Fig. 6 Recorte al 50% mostrando pérdida de textura por ruido en diafragmas bajos.
Mirando las vetas de la madera en la tarima vemos que hasta el 7º diafragma (-6EV) la textura queda aceptablemente bien registrada. En el 8º diafragma (-7EV) el ruido empieza a deteriorar progresivamente la información, pero siendo un poco benévolos aún podríamos darlo por bueno. Es sin embargo en el 9º diafragma (-8EV) donde la textura de la madera desaparece completamente y se hace casi imposible distinguir unas lamas de otras.
Llegados a este punto la imagen resulta inutilizable más allá del simple reconocimiento de formas, y el fenómeno por supuesto irá en aumento en los siguientes diafragmas. A raíz de la apreciación subjetiva realizada podremos decir que el rango dinámico de la cámara, una Canon EOS 350D a ISO100, ha resultado ser de aproximadamente 8 diafragmas útiles.
INFLUENCIA DEL ISO EN EL RANGO DINÁMICO
Antes se ha estimado que el rango dinámico de la Canon 350D es de unos 8 diafragmas a ISO100. Pero qué habría ocurrido si hubiéramos empleado otro ISO? Por la forma en que actúa el ajuste de ISO, el cual consiste en una amplificación analógica de la señal entregada por el sensor, para una misma exposición del archivo RAW nuestra imagen será más ruidosa cuanto mayor sea el ISO escogido.Por todo lo comentado respecto al ruido, este hecho tendrá como efecto inmediato una reducción del rango dinámico útil. Podemos decir que el rango dinámico se reduce del orden de medio paso de diafragma cada vez que duplicamos el valor del ISO. Eso sí, siempre y cuando estemos hablando de un mismo grado de exposición en el archivo RAW para las dos imágenes comparadas. Por ejemplo entre dos tomas perfectamente derecheadas, una con un valor de ISO mayor que la otra, la primera siempre presentará más ruido que la segunda y por lo tanto será capaz de codificar un menor rango dinámico.
Sin embargo en el caso de una escena en la que la escasez de luz ha propiciado que incluso a la máxima apertura de diafragma y con el mayor tiempo de exposición que nos podemos permitir la toma quede subexpuesta, es decir, que no logremos derechearla, el menor ruido y máximo rango dinámico los lograremos subiendo el ISO todo lo que sea posible para derechear la toma; por supuesto siempre sin llegar a quemar las altas luces. Esto se demuestra en el artículo Mejora en ruido subiendo el ISO donde además se dan explicaciones con cierto detalle sobre el mecanismo de funcionamiento de este parámetro.
CONCLUSIONES
La conclusión que hemos de sacar de todo lo analizado es que hoy por hoy el ruido en las sombras es el verdadero limitante del rango dinámico de un sensor, ya que como se ha visto a partir de cierto diafragma (el cual dependerá del sensor particular y del valor ISO empleados) hace inutilizable la información captada.Tener un número de bits suficiente en el archivo RAW es una condición necesaria para codificar un rango dinámico determinado, pero no basta para capturarlo correctamente. Así en la recientemente introducida nueva generación de cámaras de 14 bits podremos hablar de un mayor rango dinámico siempre y cuando este aumento del número de bits del RAW venga de la mano de una mejora del ruido presente en las sombras respecto a las anteriores generaciones de sensores de 12 bits. Expertos muy bien informados, basándose en análisis objetivos de ruido opinan que la Nikon D3X pudiera ser la primera réflex digital que realmente saca provecho de los 14 bits. El bajísimo ruido de lectura que presenta le proporciona un rango dinámico tal que en una codificación de 12 bits empezaría a sufrir problemas de posterización en las sombras. Todas las demás reflex digitales en cambio estarían perfectamente servidas con archivos RAW de 12 bits.
Conocidos los factores que determinan el rango dinámico en sus dos extremos me permito introducir ahora la siguiente definición desde una perspectiva centrada en el sistema captor: "El rango dinámico de un aparato de instrumentación como un amplificador o un analizador es la proporción entre la señal más pequeña que percibirá sin contaminación de ruido, y la señal más grande que aceptará sin que ocurra una sobrecarga".
Dado que el ruido en las sombras es el limitante del rango dinámico, la mejor manera de lograr un gran rango dinámico será el derecheo del histograma con el menor valor ISO posible ya que ésta es la forma de minimizar dicho ruido. Si con el menor valor posible de ISO no fuéramos capaces de derechear el histograma, no habrá que dudar en subir ese valor lo que haga falta para lograrlo ya que ello reducirá el ruido visible aumentando por lo tanto el rango dinámico captado.
MEDIDA DEL RANGO DINÁMICO DEL SENSOR
En muchas webs se realizan medidas de rango dinámico de diferentes cámaras, variando los resultados de unas a otras. Quiere eso decir que estos no son correctos? puede que sí o puede que no, pero la realidad es que la disparidad de medidas por sí misma no las invalida. Y es que el rango dinámico no es una magnitud sencilla de calcular en términos absolutos, pues requiere de la elección de un criterio de medida.En general las mediciones de rango dinámico mediante aparatos y software dedicado se basan en definiciones ingenieriles del mismo que, si bien son correctas como criterio, resultan en general poco útiles para el fotógrafo pues no le van a permitir saber cuántos diafragmas de luminosidad desde las luces más brillantes (saturación) hasta las sombras más profundas (ruido) va a poder aspirar a captar con su cámara.
En efecto, si tomamos por ejemplo la magnífica web de Roger N. Clark o los tests de rango dinámico de DxOMark, nos encontraremos con valores de rango dinámico muy grandes que no se corresponden a la realidad del mundo fotográfico. El motivo es el citado criterio escogido, generalmente una relación señal a ruido cuyo umbral es demasiado optimista pese a que responda a un baremo tecnológicamente correcto.
Si miramos el artículo Digital Camera Sensor Performance Summary de Roger N. Clark, veremos que utiliza como definición de rango dinámico la relación entre la máxima señal que puede captar el sensor (capacidad del pozo lleno expresado en electrones) y el ruido de lectura o read noise (ruido umbral medido también en electrones).
Son parámetros electrónicos del sensor, medibles o que pueden conocerse a partir de los datos de fabricación, pero que arrojan valores de rango dinámico tan altos como 13,5 pasos para la Canon 350D. Cifra de poca utilidad por sí misma para el fotógrafo ya que como hemos visto esta cámara no es capaz de capturar más de 8 pasos aceptablemente libres de ruido.
Insisto en que son valores correctos de acuerdo al criterio elegido, de hecho ambas webs me parecen de lo más recomendable, pero no son directamente aplicables por el usuario. Estas altas cifras de rango dinámico solo son útiles para establecer comparaciones entre cámaras, ya que de ellas se puede inferir cuál prestará al fotógrafo un mayor rango dinámico utilizable.
Otras webs tales como DPreview, con disparatadas mediciones y criterios, demuestran no tener ni una rudimentaria noción de lo que es el rango dinámico por lo que deberán ser directamente ignoradas en este aspecto.
De todo lo comentado es fácil deducir que comparar valores de rango dinámico obtenidos por distintas fuentes, incluso aunque éstas apliquen criterios rigurosos, es en la mayoría de casos un ejercicio inútil y engañoso.
CÁLCULO OBJETIVO DEL RANGO DINÁMICO EN DxOMARK
Acabamos de comentar que las mediciones de rango dinámico de DxOMark tienen el defecto para el fotógrafo de emplear criterios de medida demasiado benevolentes, arrojando valores de rango dinámico muy altos no aplicables en fotografía convencional. En concreto el criterio empleado para medir el rango dinámico útil es admitir una relación S/N umbral de 0dB, es decir, un nivel de ruido igual al de la señal útil.Para hacernos una idea del nivel de ruido que este criterio supone, he simulado lo que se observaría en una imagen con una relación S/N de 0dB, y también con el criterio a mi juicio mucho más útil en fotografía de 12dB, que corresponde a un nivel de señal 2 pasos de diafragma por encima del ruido, es decir cuando la señal tiene 4 veces más intensidad que el ruido.
Para ello he tomado una imagen sin demasiado contraste (para que no haya desviaciones muy grandes de relación S/N en su superficie) de valor medio 128, convirtiéndola a continuación a lineal para añadir ruido en el modo en que éste se genera en el archivo RAW. Entonces se ha añadido ruido gaussiano en los 3 canales hasta obtener una desviación estándar de dicho ruido igual al nivel de señal (para la muestra a 0dB) y a la cuarta parte de la señal (para la muestra a 12dB):

Fig. 8 Umbrales de relación S/N como criterio de rango dinámico.
Como puede verse, es muy difícil admitir que la imagen con relación S/N de 0dB pueda resultar utilizable en fotografía no científica. Sin embargo el criterio de 12dB sí que parece mucho más aceptable como límite de ruido máximo admisible en nuestras imágenes.
El motivo de introducir esta cifra de 12dB, es porque pese a que el criterio empleado por DxOMark para calcular el rango dinámico es de 0dB, pueden consultarse también las muy explicativas curvas de relación S/N en función del nivel de exposición RAW. Y como vamos a ver a continuación, con ellas podremos calcular nosotros mismos el rango dinámico de cualquier cámara de acuerdo al criterio que nos interese.
Estas curvas se han denominado 'Full SNR' y representan cuál es la relación S/N por píxel del sensor en dB para cada valor de exposición RAW. Las tomaremos en modo logarítmico, donde en el eje X se representa en escala no lineal el nivel de exposición RAW correspondiendo el 100% al valor máximo alcanzable:
Fig. 9 Relación S/N de la Nikon D200 en función de exposición e ISO.
La escala del eje X es logarítmica en base 10 (100%, 10%, 1%,...), una elección bastante desafortunada que requerirá una conversión adicional para obtener unidades logarítmicas en base 2, es decir, los EV o pasos de diafragma a que estamos acostumbrados.
Así para la gráfica anterior calculemos el rango dinámico de la Nikon D200 con los criterios de relación S/N 0dB (ingenieril) y 12dB (fotográfico), midiendo sobre la gráfica los valores del eje X que proporcionan las relaciones S/N buscadas:
- Criterio SNR 0dB: -3,4 en escala log 10, que equivale a -11,29EV
- Criterio SNR 12dB: -2,75 en escala log 10, que equivale a -9,14EV
De este modo diríamos que el rango dinámico de la Nikon D200 es de:
- 11,29EV con un criterio de S/N de 0dB
- 9,14EV con un criterio de S/N más realista de 12dB
El valor obtenido bajo el criterio 0dB debería de cuadrar con el cálculo de rango dinámico que la misma página hace para la Nikon D200, y se comprueba que es así:
Fig. 10 Rango dinámico máximo de la Nikon D200 en función de ISO.
Para algunas cámaras el cálculo del rango dinámico a partir de las curvas de S/N no cuadra de manera tan exacta con el indicado en las gráficas propiamente de rango dinámico, pero se le aproxima mucho. El concepto del cálculo que es lo que pretendía explicarse queda claro.
Me queda la duda por ejemplo de si llaman 100% al punto de saturación del sensor o al límite de la escala de bits de la cámara, que no siempre coinciden. Tampoco tengo claro si la escala del eje X, que etiquetan 'Gray scale', corresponde a los niveles RAW de uno cualquiera de los canales (que sería lo deseable), o es una combinación en luminosidad de ellos.
CÁLCULO SUBJETIVO DEL RANGO DINÁMICO
Como alternativa más práctica de medir el rango dinámico he realizado para diferentes modelos de cámaras pruebas para estimar el rango utilizable en fotografía.El método ha consistido en analizar visualmente la presencia de ruido en los distintos diafragmas de luminosidad que cada cámara proporciona en sus archivos RAW. Para conocer a qué diafragma del rango del sensor corresponde cada una de las partes de la escena me he valido de un revelado lineal de modo que la localización de los diafragmas se hace trivial.
Para llevarlo a cabo he usado DCRAW como revelador y he calculado diagramas de zonas logarítmicas con Histogrammar.
Pese a que el método está sujeto a un margen de error ya que la estimación de la mayor o menor presencia de ruido es puramente visual y por lo tanto ciertamente subjetiva, y además al no disponer de los modelos de cámaras analizados he empleado una escena diferente en cada una, considero que los resultados obtenidos son válidos con un margen de error máximo de medio paso de diafragma, y en cualquier caso nos dan muy buena idea del orden de magnitud del rango dinámico de los distintos modelos analizados.
De manera general he podido concluir dos cosas:
- Con la introducción de la nueva hornada de cámaras digitales (Canon 40D, Sony A700, Nikon D3), la mejora en rango dinámico respecto a la generación precedente ronda un paso de diafagma superando por primera vez en réflex digital la barrera de los 9 diafragmas
- Las cámaras Fuji con sensor Super CCD se mantienen gracias a su tipología de doble sensor a unos niveles todavía inalcanzables para las cámaras con sensores convencionales
| CÁMARA | RANGO DINÁMICO (EV) |
|---|---|
| Canon 350D (Fig. 6) | 8 |
| Canon 5D | 8,5 |
| Canon 40D, Sony A700 y Nikon D3 | 9 |
| Fuji S3 Pro | 11 |
El caso de la Fuji es muy particular pues su sensor Super CCD cuenta con un diseño especial de doble sensor destinado a capturar un gran rango dinámico, mejorando notablemente lo obtenido con sensores convencionales. Puede conocerse más sobre él en el artículo Fuji Super CD. HDR en la cámara.
RANGO DINÁMICO Y RESOLUCIÓN (Mpx)
Hasta ahora se ha hablado de la relación existente entre el rango dinámico y la relación S/N, refiriéndonos al ruido captado en cada píxel del sensor.Sin embargo, es conocido que cuando una imagen es reescalada a un tamaño inferior al que actualmente tiene, por una propiedad puramente estadística del ruido éste disminuye en cada píxel final respecto a la señal útil, aumentando así la relación S/N por píxel de la imagen.
Veamos numéricamente porqué: tomamos un grupo de 2x2 píxeles y lo reescalamos a un único píxel final realizando un promediado (sumar todos los valores y dividir entre 4). Al sumar los niveles de los 4 píxeles, los niveles de ruido parciales de cada uno lo hacen estadísticamente en cuadratura sumándose sus cuadrados de acuerdo a la ecuación:
Asumiendo que el nivel de ruido medio es igual en los 4 píxeles y de valor Ni, tendremos:
Dando un ruido final de N = 2 * Ni, que dividido entre 4 pues estábamos promediando los píxeles da un ruido en el píxel final de N = Ni/2. Por otro lado dado que la señal útil de 4 píxeles contiguos es similar, al promediarla queda invariante.
Si el ruido por píxel final se ha reducido a la mitad, y la señal útil ha permanecido constante, la relación S/N se ha duplicado en el proceso de reescalado que es lo que pretendíamos demostrar.
Para constatar visualmente este hecho vamos a comparar el resultado en relación S/N de dos hipotéticas cámaras A y B:
- La cámara A tiene 4 veces más resolución que la cámara B
- Pero la cámara B tiene menos ruido por píxel que la cámara A
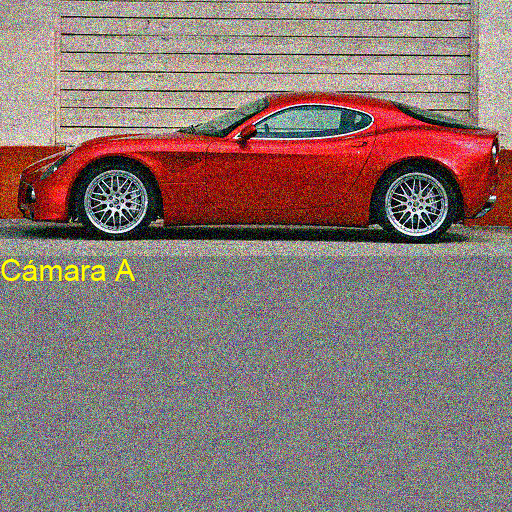
Fig. 11 Cámara A, más resolución pero más ruido por píxel.
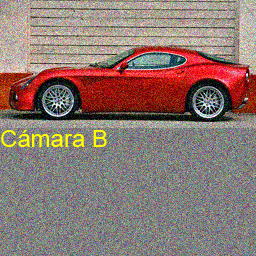
Fig. 12 Cámara B, menos resolución pero menos ruido por píxel.
Está claro que la cámara A tiene más ruido por píxel que la cámara B, basta para ello mirar los parches grises bajo la imagen. Veamos qué percepción de ruido se tiene al igualar la resolución de la cámara A a la de la cámara B:
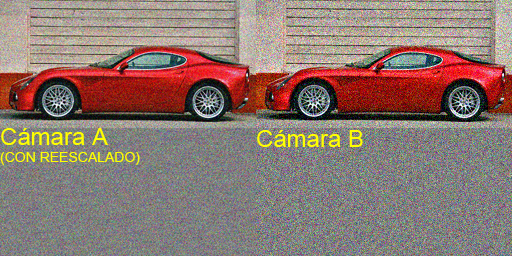
Fig. 13 Ruido cámara A vs cámara B para un mismo tamaño final.
En el proceso de reescalado, la relación S/N por píxel de la cámara A ha mejorado superando a la de la cámara B. Esto puede comprobarse tanto en los parches grises inferiores que resultan ahora menos ruidosos en la cámara A, como en la propia imagen ya que puede verse mayor detalle en el coche de la cámara A (basta observar por ejemplo la línea de la puerta del coche, que en la cámara A todavía se distingue mientras en la cámara B se pierde inmersa en ruido).
La conclusión que debemos sacar es que una cámara de mayor resolución, solo por el hecho de presentar más ruido por píxel del sensor que otra de menor resolución en recortes al 100%, no tiene necesariamente menos rango dinámico que la segunda. Será en un reescalado a un mismo tamaño de copia final donde habrá de llevarse a cabo una medición de relación S/N por píxel de la copia para determinar de manera práctica qué cámara tiene más rango dinámico en una misma aplicación fotográfica.
El ejemplo usado de 2x2 píxeles sumarizados en uno solo corresponde a una reducción de la resolución a la cuarta parte. Para un reescalado arbitrario cualquiera podemos admitir que la relación S/N quedará multiplicada por un factor lineal equivalente a la raíz de la relación de resoluciones inicial entre final.
Así por ejemplo una imagen de la Canon 5D Mark II de 5616 x 3744 píxeles (21Mpx), que reescalemos para la Web a un tamaño de 800 x 533 píxeles, experimentará una mejora de relación S/N de:
Es decir el ruido visible se ha reducido a la séptima parte al hacer más pequeña la imagen.
Éste es el motivo por el que muchas fotos cuyo nivel de ruido es lo bastante alto como para resultar evidente en una copia a gran tamaño o al ser observadas en recortes al 100%, no presentan ruido apreciable una vez son reescaladas para subir a la Web.
EFECTO DE LA RESOLUCIÓN EN EL RANGO DINÁMICO EN DxOMARK
La distinción entre rango dinámico tomando como criterio la relación S/N por píxel de la imagen tal cual sale del sensor, y la relación S/N de la imagen reescalada a un mismo tamaño final de prueba es precisamente lo que han introducido en la muy recomendable web de DxOMark, bajo las denominaciones:- 'Screen': medición del rango dinámico en función del ruido por píxel del sensor
- 'Print': medición del rango dinámico en función del ruido por píxel de la copia final
El tamaño de copia escogido en dicha web para uniformizar las comparaciones de rango dinámico es aplicado por igual a todas las cámaras. Tomando por ejemplo la Canon 5D MKII (cámara de 20Mpx y que por tanto se beneficiará especialmente de su alta resolución) obtenemos las siguientes medidas de rango dinámico (pasar el ratón por encima de la imagen para pasar del criterio 'Screen' a 'Print'):
Fig. 14 Rango dinámico de la Canon 5D MKII según criterio S/N píxel sensor o copia.
Puede verse que hay una mejora cercana a un paso de diafragma que permitirá decir que esta cámara tiene en realidad mayor capacidad de captación de rango dinámico que otras de menor resolución pero menor cantidad de ruido por píxel del sensor.
Ocurre así al compararla por ejemplo con la Canon 350D, cámara con un nivel de ruido por píxel del sensor muy parecido al de la 5D MKII lo que arroja en ambas cámaras un rango dinámico a ISO100 similar según el criterio 'Screen'.
Sin embargo debido a la mucho mayor resolución de la 5D MKII, la 350D resulta incapaz de captar el mismo rango dinámico cuando se reescala la imagen a un mismo tamaño final, lo cual se constata usando el criterio 'Print'.
Por lo tanto a la pregunta: cuál de las dos cámaras tiene más rango dinámico? la respuesta correcta atendiendo al resultado que obtendríamos con ambas cámaras en una misma aplicación fotográfica, sería claramente la Canon 5D MKII.
FUNCIONES DE MEJORA DE RANGO DINÁMICO EN CÁMARAS DIGITALES
Desde hace cierto tiempo, las cámaras digitales incorporan funciones para supuestamente mejorar el rango dinámico capturado, como por ejemplo el Highlight Tone Priority (HTP) de Canon, o el D-Lighting de Nikon.Hay que dejar claro que ninguna de estas medidas permite obtener más rango dinámico del que el sensor tiene capacidad de capturar sin el modo de alto rango dinámico activado. Se trata de técnicas ingeniosas para, llevando a cabo una captura ligeramente subexpuesta respecto a lo que el usuario ajustó en los parámetros de exposición, quemar menos información de altas luces pero con el coste de tener algo más de ruido en las sombras.
Estos métodos solo tienen sentido si se dispara en JPEG, o bien si disparando en RAW se tiene la intención de emplear el revelador RAW de la marca, donde podremos disfrutar de un procesado automático que levante las sombras al tiempo que preserva las luces, obteniendo una imagen final con más información mapeada en luces y sombras.
Pero ha de quedar claro que no se consigue nada que no pudiéramos lograr nosotros mismos sin activar el modo en cuestión, pero con una adecuada elección de la exposición y del procesado posterior. De hecho activarlo por sistema es contraproducente pues hará que la cámara nos engañe en cuanto a la información presentada sobre la exposición real obtenida en la captura.
Para más información sobre este tipo de técnicas puede leerse el artículo HTP de Canon. En RAW no aporta nada.
Si este contenido te ha resultado útil, considera realizar una contribución para asegurar la continuidad de esta web. Mantenerla supone un importante esfuerzo, así como un espacio y ancho de banda considerables en el servidor. Es una operación sencilla y totalmente segura.
gluijk@hotmail.com