DIGITAL
Creado
7 Mar 2009
Actualizado
13 Abr 2009
INTRODUCCIÓN
Es frecuente encontrarse con valoraciones de usuarios que quedaron altamente decepcionados al comparar el grano de sus imágenes digitales con el que obtenían con película química.No es para menos, y es que las cámaras digitales producen un "grano digital" mucho menos atractivo estéticamente que el que podía obtenerse en fotografía química, tanto en blanco y negro como en color.
Hay quien opina que todo es acostumbrarse, que finalmente asumiremos el grano digital como el habitual y aprenderemos a valorarlo. Yo soy escéptico ante esto, el grano digital me resulta, en especial en imágenes en color, sumamente desagradable.
En el presente artículo vamos a estudiar el ruido en la captura como origen del "grano digital", y veremos que su naturaleza es la misma en cualquier sensor. Así poco sentido tendrán las comparaciones entre el grano de las distintas cámaras, ya que todas ellas producen el mismo tipo de grano solo variando la cantidad del ruido que lo originó.
También estudiaremos cómo es la manifestación final del grano digital y las variables que la condicionan. Se desmitificará la existencia de un ruido de crominancia separado del ruido de luminancia ya que ambos son producto del mismo origen, y aparecerán paralelamente en función de la mayor o menor presencia de ruido en la captura digital.
ESTADÍSTICA DEL RUIDO DIGITAL
Como ya hemos adelantado en la introducción, el "grano digital" no es sino la consecuencia del ruido generado por el sensor.En un sensor típico con patrón de Bayer, encontraremos píxeles de color rojo, verde o azul, en función de la banda pasante del microfiltro que los cubra. Sin embargo, a efectos de la naturaleza y forma del ruido estos filtros son irrelevantes.
El ruido que se vaya a producir en cualquiera de los tres canales tendrá así el mismo tipo de distribución estadística y su amplitud en cada sensor dependerá solo de dos variables: la cantidad de fotones finalmente recibidos por el fotocaptor, y el ajuste ISO empleado, y no del canal concreto.
Dejando al margen efectos de segundo orden como es el banding en las sombras profundas o el ruido térmico específico en las tomas de larga duración, el ruido generado en cualquier fotocaptor tendrá dos posibles orígenes dominantes:
- Ruido de lectura: se agrega bajo esta denominación al ruido electrónico generado en toda la circuitería de la cadena de captación de luz (circuitos de lectura del sensor, amplificador ISO y conversor A/D). Es aproximadamente constante en todos los fotocaptores y es el dominante en las sombras profundas.
- Ruido fotónico: es inherente a la naturaleza aleatoria del proceso de llegada de fotones. Es proporcional a la raíz del número de fotones captados y es el dominante en las sombras medias y luces.
Para el propósito del presente artículo solo nos interesa saber el tipo de distribución estadística que sigue el ruido:
- Por un lado el ruido de lectura tiene una distribución de ruido gaussiano de media nula alrededor del nivel esperado.
- Por otro lado el ruido fotónico tiene una distribución de Poisson, propia de un proceso aleatorio con llegadas discretas, en este caso referido a la conversión de fotones en cada píxel del sensor.
Y como la suma de dos distribuciones gaussianas de media nula constituye otra distribución de tipo gaussiano y media nula, podremos concluir que el ruido que se genera en cada fotocaptor quedará bien caracterizado por una distribución de ruido gaussiano, del mismo tipo que aquél que nos permite añadir Photoshop en nuestras imágenes.
Vamos a comprobarlo empíricamente:
RUIDO DE LECTURA. ANÁLISIS DE UN DARK FRAME
Un dark frame es probablemente la fotografía más fácil de obtener que pueda imaginarse: consiste en realizar una captura con el objetivo tapado. Con ella vamos a poder obtener la distribución del ruido de lectura, ya que en ausencia de señal será el único que haya.Es esto lo que hacen nuestras cámaras cuando se activa el modo de reducción de ruido en tomas de larga duración, y pareciera que tras cada toma la máquina se quedase realizando algún tipo de procesado. La cámara en realidad no está haciendo más que una fotografía con el obturador cerrado, y generalmente de la misma duración que la captura original para simular lo más fielmente posible las condiciones térmicas de la toma real.
Este dark frame será sustraído por la cámara en el dominio Bayer al propio RAW obtenido a partir de la escena antes de almacenar el RAW definitivo. La resta permitirá reducir el ruido final sin conllevar una pérdida de texturas gracias tanto al propio promediado estadístico de ruido que supone la resta, como también a la eliminación de fenómenos de ruido de localización espacial invariante tales como el banding o los hot pixels.
Algunos reveladores como DCRAW permiten que el usuario genere sus propios dark frames para sustraerlos en el revelado RAW fuera de la cámara. Los astrofotógrafos son los mayores expertos en el uso de estas capturas oscuras para reducir el ruido en tomas del cielo nocturno con software dedicado que explota estas técnicas.
Hecho este inciso sobre la utilidad de los dark frames, para el caso que nos ocupa no vamos a hacer nada de todo eso. Tan solo queremos ver qué aspecto tiene el histograma RAW del ruido y para ello me he valido de un dark frame aprovechando una cualidad de las cámaras Canon, y es que los datos del archivo RAW no parten del nivel 0 sino de uno bastante mayor (generalmente de una potencia de dos: 256, 1024,...).
En otras marcas los datos RAW aparecen recortados en el 0 con lo que se pierde todo aquel ruido que adquiriese un valor negativo, inferior al del hipotético nivel representativo del negro absoluto.
Antes de calcular el histograma he realizado un revelado rápido del dark frame resaltando fuertemente con curvas todo el ruido presente, obteniendo la siguiente imagen:
Fig. 1 Dark frame obtenido con la 350D (exposición 30s, ISO1600).
La toma oscura se realizó a ISO1600, con una duración de 30s y sin reducción de ruido para garantizar una buena presencia de ruido final.
Queda claro que el ruido de lectura es mayor en la mitad inferior de la imagen (mitad superior del sensor). Así fotografiando paisajes colocar la cámara boca abajo dará una distribución del ruido más uniforme, ya que el suelo es donde habrá zonas de sombra candidatas a ser ruidosas (nunca se me ocurriría hacerlo).
Pueden verse también algunos patrones de banding horizontal así como una fuerte zona ruidosa en la parte inferior derecha de la escena (parte superior izquierda del sensor por lo tanto), posiblemente debida a alguna fuente de calor cercana.
Aunque el cálculo que vamos a hacer es solo una aproximación, para minimizar la influencia del banding y la no uniformidad espacial del nivel de ruido vistos, tomamos solo un parche cuadrado situado en el extremo superior izquierdo de la imagen.
Realizamos una extracción pura de los datos RAW del dark con el comando DCRAW:
dcraw -v -D -4 -TObteniendo el siguiente histograma RAW con Histogrammar:
Fig. 2 Histograma RAW de ruido de lectura con zoom 1:1.
El histograma obtenido puede aproximarse muy bien por una distribución gaussiana en torno al valor 257, que representaría el negro teórico de la imagen si ésta no tuviera ruido alguno.
También es importante notar que la curva es idéntica en los tres canales. Es decir, a efectos del ruido de lectura no hay ninguna diferenciación por canal, sino que todos los fotocaptores se ven afectados por igual.
RUIDO FOTÓNICO
Para comprobar que esa estadística gaussiana se mantiene en presencia de señal, realizamos ahora una captura con una luminosidad tal que el ruido fotónico haya pasado claramente a ser dominante.Depende de cada cámara, pero en general los ruidos de lectura y fotónico se igualan a unos 6 pasos de diafragma de la saturación. Así realizamos una captura cuyos niveles rojo y verde hayan caido dentro del tercer paso de diafragma, quedando el canal azul en el quinto diafragma.
El motivo escogido ha sido una pared blanca lisa uniformemente iluminada, sobre la que se ha hecho una captura desenfocada a ISO1600 de la cual se ha recortado solo un parche central cuadrado de 400 píxeles de lado, para evitar la influencia de cualquier viñeteo.
Con el mismo comando que aplicamos al RAW del dark frame, extraemos el histograma del RAW puro obteniendo en este caso el siguiente gráfico:
Fig. 3 Histograma RAW de ruido fotónico con zoom 1:1.
Puede verse que los microfiltros, junto con la particular iluminación de la escena, difenciaron la cantidad de luz que recibieron los fotocaptores de cada canal: en el canal azul es en el que menos cantidad de luz se captó como es habitual, y el canal rojo debido a la iluminación de tungsteno a punto estuvo de superar al canal verde, que casi siempre es el que más luz recibe. Pero no hubo cambios en la naturaleza estadística del ruido que se mantiene gaussiano en los tres canales.
La campana de Gauss más estrecha (y por tanto de mayor amplitud en el histograma) del canal azul, se debe a que éste capturó menos cantidad de luz y presentó por lo tanto una menor cantidad de ruido fotónico. No confundir este menor ruido absoluto con la relación señal a ruido, que obviamente es mayor cuanto mayor es la exposición lograda en un canal. Por tanto fue el canal verde el que logró una mejor relación señal a ruido y de ahí una menor cantidad de ruido visible final.
Que un canal resulte con más ruido visible que otro no dependerá así de la electrónica de captación de la luz, sino de los factores externos (contenido espectral de la luz de la escena y respuesta de los microfiltros) que propiciarán una mayor o menor cantidad de fotones capturados, y de ahí una determinada relación señal a ruido por canal.
Se comprueba por lo tanto la estadística gaussiana que tiene el ruido generado por los fotocaptores de un sensor, en cualquier situación de luz incidente e independientemente del canal.
Lo visto nos debe hacer deducir además que no tiene sentido hablar de un ruido de crominancia diferenciado del ruido de luminancia. Es decir, no puede haber un sensor que presente mucho ruido de luminancia y muy poco de crominancia o viceversa, pues ambas facetas del ruido visible final están ligadas al mismo ruido original.
Parece lógico pensar que el ruido de crominancia será más sensible a los desequilibrios en las relaciones señal a ruido entre canales, quedando bastante influido por el canal que peor relación señal a ruido presente, mientras que por el contrario el ruido de luminancia será más próximo a un promedio ponderado de las relaciones señal a ruido presentes en todos los canales.
ANÁLISIS DE RUIDO EN ARCHIVO RAW
A continuación vamos a utilizar los archivos RAW obtenidos a partir de una escena real para corroborar por inspección visual la naturaleza gaussiana del ruido que se tiene en cada fotocaptor, y constatar además que éste es independiente del encontrado en píxeles adyacentes.Para ello no revelaremos los archivos sino que llevaremos a cabo una extracción de los datos contenidos en el RAW, analizando la distribución de ruido en uno cualquiera de los tres canales.
Se tienen dos capturas de la siguiente escena separadas 4 pasos de diafragma en exposición:

Fig. 4 Escena de prueba para análisis de ruido en el RAW.
El motivo de tener dos archivos RAW es porque usaremos la captura +4EV como referencia de lo que sería una imagen aproximadamente con cero ruido (de hecho proviene de un trabajo reciente en el que por sistema usé un ahorquillado en todas las escenas para que el problema del ruido fuera historia).
Lo que haremos será extraer los datos RAW de ambos archivos, corregir la exposición de la toma 0EV para igualarla a la toma +4EV, y comparar la siguiente secuencia de imágenes: captura +4EV, captura +4EV con ruido gaussiano añadido en Photoshop, y captura 0EV.
Antes de mostrar el resultado explicaré el procedimiento para extraer los datos RAW y quedarnos con el canal que nos interesa. Elegiremos en este caso el azul.
Para extraer los datos RAW usaremos el siguiente comando de DCRAW:
dcraw -v -d -r 1 1 1 1 -4 -TCon él aparte de extraer la información, se corregirá el punto negro y de saturación, y se reescalará toda la imagen a 16 bits para que nos sea más fácil manejarla en Photoshop. Pero no por ello dejarán de ser datos RAW aún no interpolados.
Hecha la extracción abrimos el TIFF resultante en Photoshop que tendrá la estructura de Bayer típica aunque en escala de gris. Como el patrón de Bayer de la Canon 350D es RGGB, para tener el canal B habremos de quedarnos con los píxeles de las filas y columnas pares de acuerdo al siguiente esquema:
Fig. 5 Procedimiento de extracción del canal B del RAW.
Existe un método muy simple para realizar esto en Photoshop, y es reescalar la imagen al 50% de su tamaño actual con el método de 'Aproximación', que lo que hace es quedarse con uno de cada 4 píxeles (en este caso por su ubicación el correspondiente al canal azul) desechando el resto.
Lo aplicamos al TIFF obtenido con DCRAW quedando así (se muestra una pequeña porción):
Fig. 6 Recortes al 200% de procedimiento de extracción del canal B del RAW.
Para extraer cualquier otro canal (el rojo o uno de los dos canales verdes), bastaría añadir antes del reescalado un píxel de lienzo por arriba y por abajo (G1), un píxel por la derecha y por la izquierda (G2), o un píxel tanto por arriba y abajo como por la derecha e izquierda (R), desechando a continuación la/s líneas de lienzo supervivientes al cambio de tamaño.
Hecha la extracción del canal B, mostramos una secuencia del mismo compuesta por: imagen +4EV (cero ruido), imagen que resulta de sumarle a la anterior una cantidad de ruido gaussiano de amplitud equivalente al que presenta la imagen 0EV (medido de manera aproximada con la desviación estándar del histograma de Photoshop), y finalmente la imagen 0EV:

Fig. 7 Recortes al 100% del canal B del RAW en capturas 0EV y +4EV.
El ruido aleatorio gaussiando que añadimos en Photoshop es indistinguible del ruido real que capturó el sensor en la toma 0EV.
Esto nos hace intuir no solo la naturaleza gaussiana de su distribución de amplitudes, sino también que el ruido en cada fotocaptor no tiene correlación con el ruido presente en fotocaptores cercanos, cosa que precisamente se cumple en la herramienta de 'Añadir ruido' de Photoshop.
Para estar más seguros de este hecho vamos a estudiar la correlación entre el ruido existente en un píxel y el ruido en píxeles adyacentes. Se han hecho varias comparaciones sobre un parche de 1000x1000 píxeles en el dark frame, de las que solo muestro la resultante de contrastar el ruido en cada fotocaptor R con el ruido en su vecino de la derecha, que se trata de un fotocaptor G1:
Fig. 8 Scatter de ruido en fotocaptores vecinos R vs G1.
Se trata de un gráfico de dispersión en el que en los ejes X e Y se representan respectivamente los niveles de ruido en los fotocaptores R y G1, correspondiendo un ancho de un píxel en el gráfico a un nivel del RAW real. El tono de gris representa en escala logarítmica el número de píxeles del parche analizado que contenían la correspondiente combinación de ruido (R,G1).
Es fácil deducir del gráfico que no hay ninguna correlación entre el ruido de ambos tipos de fotocaptores pues se trata del resultado esperado de intersecar dos distribuciones gaussianas independientes. Y la misma distribución se obtiene para cualquier otra combinación de fotocaptores y localizaciones (vecinos arriba vs abajo, derecha vs izquierda, fotocaptores R, G1, G2 y B), por lo que podemos concluir que en el RAW el ruido no tiene estructura espacial alguna.
QUÉ DETERMINA EL "GRANO DIGITAL"
Sin embargo no todas las imágenes que vemos presentan un ruido con el mismo aspecto. Cómo es esto posible si como hemos visto la naturaleza del ruido producido por cualquier sensor es la misma, y además carece de una forma definida o de una diferenciación real entre ruido de crominancia y de luminancia?.Lo que diferenciará el aspecto del ruido final, aparte de la cantidad (amplitud) de ruido generada por el sensor en sus fotocaptores, no puede ser otra cosa que el procesado del RAW que se haga con posterioridad a la captura, ya sea dentro de la cámara o en un revelado RAW realizado por el usuario.
Podemos considerar como elementos integrantes de este procesado:
- El algoritmo de demosaicing con el que se van a interpolar los niveles desconocidos en cada píxel
- Cualquier proceso de reducción de ruido llevado a cabo, ya sea antes o después del revelado RAW
REDUCCIÓN DE RUIDO
La reducción de ruido es complicada de estudiar porque existen innumerables procedimientos, aplicados tanto dentro como fuera de la cámara tanto en los reveladores RAW como en diferentes plugins reductores de ruido.Unos son más agresivos o efectivos que otros, más centrados en el ruido de color o en el de luminancia,... En definitiva se trata de procedimientos de naturaleza dispar no comparables y que lógicamente proporcionan un aspecto muy diferente a la imagen.
En principio solo el usuario que dispare en RAW tendrá la posibilidad de garantizar que aplica a todos sus archivos el mismo tipo y cantidad de reducción de ruido, o en el mejor de los casos para realizar comparaciones de grano digital, podrá obviar cualquier reducción de ruido.
Solo cuando se comparen cámaras diferentes que ya hayan aplicado de manera transparente al usuario procedimientos de reducción de ruido en los archivos RAW, se perderá está igualdad de criterio. Si bien estas reducciones en el RAW no suelen hacerse notar demasiado por la posible pérdida de información, al menos para valores de ISO bajos.
ALGORITMO DE DEMOSAICING
Lo que sí resulta más interesante de comprobar es la muy distinta apariencia que tendrá la interpretación del ruido en forma de "grano digital" en función del algoritmo de interpolación usado.Como los reveladores RAW comerciales no permiten seleccionar dicho algoritmo, y comparar el resultado de revelar un mismo RAW con diferentes reveladores siempre nos dejaría la incógnita de si se han producido reducciones de ruido ocultas, vamos a usar el revelador Perfect RAW que está siendo desarrollado por Manuel Llorens, Egon y Fernando Ariznavarreta.
Este revelador está basado en el código de DCRAW, que ya de por sí permite elegir entre varios algoritmos de interpolación Bayer. Pero Manuel le ha añadido el algoritmo AFD, que resulta muy útil en situaciones de mucho ruido pues produce un grano más agradable de ver, con una interpretación del ruido de color más contenida que otros, y un ruido de luminancia más parecido al grano analógico.
Como contrapartida no es tan bueno interpretando líneas rectas como lo es por ejemplo AHD, que precisamente tiene el handicap en presencia de mucho ruido en el RAW de interpretar éste erróneamente como pequeños tramos rectos o "laberintos".
En la siguiente imagen se compara el revelado producido por ambos algoritmos sobre el rectángulo indicado en la Fig. 4. Se ha contrastado el resultado para resaltar el aspecto del grano por lo que deben ignorarse los tonos obtenidos:
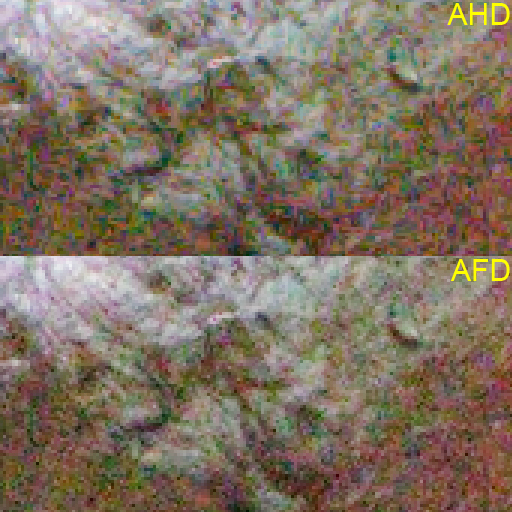
Fig. 9 Recortes al 300% de grano digital resultante tras el revelado RAW.
Puede deducirse que el tamaño del grano digital por decirlo de algún modo es constante, y equivalente a una cantidad de píxeles fija para cualquier nivel de ruido capturado. Es decir, en imágenes digitales mayor cantidad de ruido en origen significará que el grano será más evidente, pero nunca más "grande" coloquialmente hablando, como sí ocurría en película química.
Ésta es otra de las desventajas del grano digital frente al analógico, y que hace con el primero imposible lograr el efecto estético de grano grueso tan buscado muchas veces con película química de alta sensibilidad.
El motivo es que el ruido capturado en cada fotocaptor del RAW es totalmente independiente de los que le rodean, como ya hemos visto, y por lo tanto el "tamaño" del grano vendrá solamente determinado por el área de influencia que tenga cada píxel ruidoso en la imagen final interpolada de acuerdo al algoritmo usado.
Podemos ver en particular que el grano producido por AFD adquiere visualmente el tamaño de píxeles individuales y aislados en la imagen final, y ése será siempre su tamaño independientemente del nivel de ruido o la resolución de la imagen. AHD por sus características detectoras de bordes genera pequeños "palitos" también de un tamaño aproximadamente constante.
AFD resulta especialmente interesante en capturas con mucho ruido o bien donde no aparezcan elementos artificiales que puedan dar lugar a patrones geométricos, como por ejemplo paisajes o escenas de naturaleza. Además por la forma en que está diseñado, AFD requiere de un cálculo previo de la luminancia por lo que es idóneo para obtener imágenes en BN con rapidez, calidad y un grano agradable dentro de los límites del digital.
CONCLUSIONES
En el presente artículo se ha pretendido dar una visión del origen del "grano digital" como consecuencia del ruido generado por el sensor.Se ha desmitificado que este ruido sea diferente en cada canal, y se ha comprobado que sigue una distribución gaussiana que es además independiente en cada fotocaptor de los adyacentes, careciendo por tanto de cualquier estructura espacial.
Por este motivo resulta indisoluble la correlación entre los ruidos de luminancia y de crominancia presentes en la imagen final, al proceder ambos de un mismo ruido físico original. Por ello no tiene sentido afirmar que determinada cámara presente mucho ruido de crominancia y poco de luminancia, ni viceversa. Ambos están íntimamente ligados.
El hardware de la cámara (sensor), tiene poco o nada que decir en la apariencia final del grano digital. Así carece de sentido atribuir al grano digital proporcionado por ninguna cámara digital cualidades diferenciadoras del resto de cámaras.
Serán el algoritmo de interpolación Bayer empleado por el revelador RAW, las estrategias de reducción de ruido aplicadas, y el procesado del usuario los que den foma y diferencien el "grano digital" de unas imágenes y otras.
Se ha introducido AFD como un algoritmo que proporciona un grano digital especialmente agradable y en cierta medida más parecido al grano analógico que el producido por algoritmos más populares como AHD.
Aún así, el aspecto del grano digital quedará siempre lejos del estético grano químico, por lo que si pretendemos obtener la apariencia del último se hace aconsejable minimizar el ruido en la captura digital, y añadir el grano en postproceso con cualquiera de los plugins existentes. Ésta es una de las pocas desventajas del soporte digital frente al químico.
Si este contenido te ha resultado útil, considera realizar una contribución para asegurar la continuidad de esta web. Mantenerla supone un importante esfuerzo, así como un espacio y ancho de banda considerables en el servidor. Es una operación sencilla y totalmente segura.
gluijk@hotmail.com