DE ALTO
RANGO
DINÁMICO
Creado
30 Dic 2007
Actualizado
3 Ene 2008
INTRODUCCIÓN
La motivación del presente artículo surgió algunos meses atrás con la aparición en el mercado de la Leica M8, la primera telemétrica digital de la marca y buque insignia de su desembarco en el mundo digital.Los usuarios de las cámaras Leica y telemétricas en general son fotógrafos bastante particulares. Buscan en sus cámaras unas prestaciones y sensaciones que no pueden obtener con cámaras réflex en muchas ocasiones más baratas y de aparentes mayores prestaciones.
Una cámara telemétrica es idónea dado el tamaño y peso contenidos tanto de su cuerpo como sobre todo de sus ópticas para la realización de reportaje social pasando desapercibidos de la manera más discreta posible.
Es conocido el gusto por el BN en este tipo de fotografía que, pese a los augurios de algunos expertos creo que tiene y tendrá larga vida en el mundo digital. No hay más que ver la multitud de técnicas que han surgido para convertir imágenes digitales en color a BN así como la profusión de galerías digitales en BN que todos podemos ver en Internet sin necesidad de hacer mucho esfuerzo.
En su momento me puse en la piel de un fotógrafo que con su Leica M8 en la mano fuera sabedor de que su fotografía iba a ser en BN, y me surgía la siguiente pregunta: "si lo que voy a hacer con esta cámara son fotos en BN, por qué no han hecho una cámara digital que haga las mejores posibles fotos en BN?"
Fig. 1 Reportaje de crónica social en BN.
MOTIVACIÓN DE UNA CÁMARA DIGITAL SOLO PARA BN
La primera pregunta que asaltará a muchos es: si las fotos en color de mi cámara digital las puedo convertir a BN, para qué iba a querer una cámara que solo me permita realizar fotografías en BN?. Desde un punto de vista de marketing el argumento es de una lógica aplastante.Para contestar satisfactoriamente le daré la vuelta al interrogante: si yo sé con certeza que todo o gran parte de mi trabajo voy a realizarlo en BN, por qué voy a lastrar todas esas fotografías que he previsualizado como imágenes en BN con las limitaciones de un sensor diseñado para fotografía en color?.
Porque no nos engañemos, para el fotógrafo que busca la máxima calidad posible para sus trabajos, la conversión de fotografías en color a BN lejos de ser ideal es totalmente ineficiente. Desde un punto de vista técnico la fotografía en BN no es un subconjunto de la fotografía en color pues una serie de motivos impiden a un sensor color ser óptimo para realizar fotografía en BN:
- Un sensor color divide la luz incidente en tres bandas de frecuencias mediante filtros paso banda. Esta discriminación, lejos de ser perfecta, lo que provoca es un tamizado irregular de la señal luminosa que de no ser necesario (y en fotografía BN no lo es) supone un deterioro de la calidad de la información captada.
- Además este filtrado implica una disminución de la intensidad luminosa que llega al sensor respecto a la incidente, lo que hace al sensor Bayer perder eficiencia óptica convirtiéndolo en un dispositivo menos luminoso que requerirá mayores tiempos de exposición para lograr una misma excitación luminosa.
- En relación con lo ya comentado, la topología de sensor de Bayer implica que tan solo uno de cada tres valores codificados para cada píxel ha sido realmente captado de la escena, siendo los otros dos interpolados, es decir recreados a partir de muestras reales. De ese modo solo una fracción de la información que participa en la recreación de la imagen en BN ha sido realmente capturada de la escena, siendo la restante información inventada por un proceso software.
- A lo anterior se han de añadir los problemas que causa tener un grado de interpolación tan grande de la información, como son los conocidos efectos de aberraciones cromáticas y moiré surgidos en el proceso de demosaicing, y que no se darían o lo harían en menor grado si se emplease un sensor que no implicara un grado tan alto de interpolación.
- La multitud de métodos y algoritmos surgidos para convertir una imagen de color a BN (paso a modo escala de grises, método Lab, mezcla de canales, métodos más sofisticados de autores particulares,...) no solo no se han de interpretar como un plus de flexibilidad o potencia, sino que al contrario, son indicio claro de que ninguno de ellos resulta plenamente satisfactorio como método general a emplear.
- Aparte de esto último, y suponiendo que sí diéramos con un método de conversión adecuado, el paso de color a BN no dejará de ser un quebradero de cabeza adicional, conceptualmente innecesario en el flujo de trabajo del fotógrafo de BN.
Es por todo ello por lo que pienso que el concepto de una cámara digital dedicada exclusivamente a la fotografía en BN puede tener su propio mercado en toda una serie de usuarios específicos que buscan la máxima calidad en este tipo concreto de fotografía.
No es preciso que alguien haga solo fotografía en BN para interesarse por un sistema así; es suficiente que el fotógrafo sea consciente de que gran parte de su trabajo se realiza en BN para que le pudiera resultar interesante una cámara de estas características. Al fin y al cabo, no era habitual hasta hace dos días ver a fotógrafos usar un cuerpo para color y otro para BN?
Insisto que un sensor de este tipo no sería una solución general, sino de nicho para un grupo específico de usuarios de cámaras digitales, como lo pueden ser por filosofía muchos de los usuarios de cámaras telemétricas.
PROPUESTA DE DISEÑO DE SENSOR DIGITAL BN DE ALTO RANGO DINÁMICO
Hasta ahora hemos definido el concepto de lo que vendría a ser un sensor dedicado en exclusiva a la fotografía en BN, vamos a proponer a continuación una posible implementación del mismo.La propuesta de diseño más sencilla para implementar un sensor digital exclusivo para fotografía en BN consistiría simplemente en una cuadrícula de píxels sin ningún tipo de filtrado paso banda, de modo que se haga incidir sobre cada fotocaptor la luminosidad correspondiente a toda la banda del espectro visible, desde las menores longitudes de onda (rojos más cercanos al infrarrojo) hasta las mayores (violetas cercanos al ultravioleta).
Un sensor con esta filosofía tendría la gran ventaja de no requerir interpolación alguna para obtener la imagen final ya que todos los datos de la imagen estarían presentes en sus archivos RAW en forma de niveles captados directamente de la escena, obviando así los problemas y complejidades asociados a los algoritmos de demosaicing. Podría denominarse esta estructura como un "Foveon para BN".
Fig. 2 Distribución fotocaptores sensor BN básico.
Sin embargo he preferido no detenerme aquí e ir un poco más lejos, basándome en observaciones claramente corroboradas:
- Uno de los talones de Aquiles de la fotografía digital actual es la escasez de rango dinámico de los sensores disponibles, que en rara ocasión llega a los 9 diafragmas en las réflex de precios razonables más recientemente introducidas. Este rango dinámico es todavía incapaz de captar muchas de las escenas de alto contraste a las que el fotógrafo digital debe enfrentarse en un momento dado.
- Se ha demostrado que dicha limitación de rango dinámico es fácilmente salvable si se realiza una simple fusión de imágenes tomadas sobre la misma escena pero con distintos grados de exposición, resultando en una imagen final de rango dinámico expandido.
- Además hablando de fotografía en BN toma especial relevancia la definición de las sombras, que desprovistas de su croma dependerán exclusivamente de la mayor o menor presencia de ruido de luminosidad, así como de una riqueza tonal consistente para quedar bien definidas.
- Una estructura hardware sencilla de implementar.
- Una expansión del rango dinámico mediante la reducción de ruido y aumento de riqueza tonal en las sombras.
- Y todo ello con una mayor eficiencia óptica y un menor grado de interpolación de la información captada que en el sensor Bayer.
TOPOLOGÍA PROPUESTA
Planteo un sensor de estructura dual donde se intercalen alternativamente celdas con fotocaptores de sensibilidad reducida mediante microfiltros atenuadores de densidad neutra, de modo que se reduzca en una determinada cantidad de diafragmas la luminosidad incidente en algunos de los fotocaptores.
De este modo la estructura del sensor sería sencilla de fabricar ya que todos sus fotocaptores y sistema de lectura son de la misma naturaleza diferenciándose tan solo en que la mitad de ellos vendrían afectados por este filtrado neutro según la siguiente distribución:
Fig. 3 Distribución filtros sensor BN de alto rango dinámico.
En el ejemplo he propuesto un filtrado de 4 pasos de atenuación de modo que ante una misma exposición sobre el sensor, los fotocaptores cubiertos por el filtro (coloreados en gris en el esquema) generarán un nivel de señal 4 diafragmas por debajo de sus homólogos carentes de filtro.
Esto implica poder lograr una expansión del rango dinámico de 4 diafragmas, de modo que si el rango dinámico nativo del sensor base fuera de unos hoy más que asequibles 8 diafragmas, el sensor resultante sería capaz de registrar con gran definición escenas de hasta 12 diafragmas de rango dinámico total.
La filosofía es la misma que la que inspira el sensor Fuji Super CCD, solo que en este caso la estructura se basa en un único tipo de fotocaptor derivándose la diferenciación en sensibilidad del empleo de los microfiltros neutros.
TAMAÑO DEL ARCHIVO RAW GENERADO, MPX Y RATIO DE INTERPOLACIÓN
El archivo RAW no requeriría ser doble como ocurre en el Super CCD de Fuji. Un sensor de este tipo por decirlo de algún modo funcionaría en todo momento en el modo de alto rango dinámico de aquél, generando un archivo RAW que tendría siempre el mismo formato y tamaño.
Los píxels correspondientes a fotocaptores filtrados y no filtrados se almacenarían de forma indistinta en el mismo fichero, simplemente los niveles registrados en ellos serán netamente diferentes y sería en el proceso de revelado donde se establecería la diferenciación y aportación que cada uno habrá de tener a la imagen final.
En cuanto al número de Mpx de los archivos generados, se podrían establecer eternas discusiones. Para un sensor de este tipo con 12 millones de fotocaptores divididos en dos juegos de captores dedicados a partes diferentes de la escena lo correcto es admitir que solo la mitad de los píxels de la imagen final corresponderían directamente a valores captados. Por lo tanto lo correcto es admitir que dicho sensor tendría 6 Mpx reales con el 100% de la información captada y otros 6 Mpx con el 100% de la información interpolada.
En un sensor Bayer equivalente de 12 millones de fotocaptores, se tendría la ventaja de disponer de alguna información captada para todos los píxels finales de la imagen, pero también es cierto que en todos ellos dos de los tres canales que componen la información total sería interpolados no disponiendo para ninguno de los píxels finales de toda la información captada.
En mi opinión, pese a la ventaja espacial del sensor Bayer de contar con cierta información parcial captada en todos los fotocaptores, el grado de interpolación de información al que estamos sujetos con él es mayor al exigido por el sensor BN propuesto y por lo tanto conceptualmente este último transferiría a la imagen final una mayor cantidad de información real captada en la escena que un sensor Bayer con el mismo número de fotocaptores.
Si como es habitual consideramos un sensor Bayer de 12 millones de captores como un sensor de 12Mpx reales, estaríamos admitiendo que para obtener la misma cantidad de píxels reales con un sensor como el propuesto se requerirían 24 millones de fotocaptores.
Soy totalmente contrario a este criterio. Opino que si se compara un sensor Bayer de 12 millones de fotocaptores con un sensor como el propuesto con el mismo número de fotocaptores, el % de información interpolada va a ser incluso mayor en el Bayer por lo que no parece correcto admitir que un sensor Bayer de 12 millones de fotocaptores pueda considerarse en absoluto como un sensor de 12Mpx reales de información.
Como muestra gráfica valga la siguiente representación de ambos tipos de sensores y del nivel de información captada por cada uno en cada fotocaptor. En color cyan se muestra la información que habrá de ser interpolada en uno y otro. Como el canal G tiene un mayor peso en la información sobre la escena se han atribuido los pesos de la norma video CCIR para cada canal: R=29,9%, G=58,7% y B=11,4%:
Fig. 4 Informacion captada por tipo de sensor: Bayer (izq.) vs propuesta BN (der.).
Si calculamos el % de información captada en cada uno de ellos tendríamos:
- Sensor Bayer de distribución típica RGGB: (29,9% + 58,7% * 2 + 11,4%) / 4 = 39,7%
- Sensor BN propuesto: (100% + 0%) / 2 = 50%
En cuanto al tamaño del archivo RAW final en MB, éste sería el mismo que el que tendrían los RAW de un sensor Bayer con el mismo número de fotocaptores y bits en la codificación pues se requiere almacenar exactamente la misma cantidad de información, un valor por cada fotocaptor del sensor (ha de pensarse que el sensor propuesto para BN es dual).
ESTRATEGIA DE DEMOSAICING Y FUSIÓN DE IMÁGENES
Para revelar de forma óptima una imagen registrada con la topología vista me planteo como más adecuado el siguiente algoritmo para un hipotético sensor de 12 millones de fotocaptores:
- Generar por separado dos imágenes de 12Mpx cada una, una a partir de los 6Mpx no filtrados y otra a partir de los 6Mpx sobre los que se ha hecho un filtrado neutro. Dada la topología tan sencilla vista en la que cada píxel a interpolar está rodeado por 4 valores conocidos, el algoritmo de interpolación a emplear es fácilmente optimizable.
- Realizar una fusión de ambas imágenes de modo que cada píxel de la imagen final se tomará de la imagen más expuesta (la correspondiente a los fotocaptores no filtrados) siempre que el píxel en dicha imagen no esté saturado. En caso contrario se tomará el valor del píxel de la imagen menos expuesta (la correspondiente a los fotocaptores filtrados).
- El algoritmo de fusión podrá ser mejorado dotándolo de medidas tales como permitir una cierta fusión progresiva en los tonos medios para evitar que se note el posible salto en las áreas de solape entre zonas tomadas de una imagen o de la otra.
Ambos problemas quedan plenamente subsanados en un esquema de sensor como el propuesto donde las tomas necesariamente van a estar alineadas píxel a píxel pues los fotocaptores lo están, y ambas serán reflejo exactamente de los mismos contenidos de la escena independientemente del movimiento que pueda presentar ésta dado que se captan durante el mismo intervalo de exposición.
SIMULACIÓN DE FUNCIONAMIENTO DEL SENSOR BN DE ALTO RANGO DINÁMICO
Para evaluar la posible pérdida de detalle y calidad debido a la requerida interpolación, y contrastar si dicha pérdida, caso de existir, se ve o no compensada con la expansión de rango dinámico y menor ruido obtenidos, voy a hacer una simulación del funcionamiento de un sensor con esta filosofía comparando los resultados con los que se habrían obtenido con un sensor monocromo sin filtros en sus fotocaptores y que por lo tanto no requeriría de interpolación alguna para obtener el BN final.Para abreviar al sensor propuesto lo llamaré "sensor BN HDR" mientras que al sensor desprovisto de filtros y que no requiere interpolación lo llamaré "sensor BN básico".
METODOLOGÍA
Obviamente no dispongo de un sensor que no tenga microfiltros RGB en sus fotocaptores pues el sensor de mi cámara es Bayer. Sin embargo considero correcto realizar la siguiente secuencia de pasos para llegar a una comparación totalmente válida de ambas filosofías de sensor:
- En una escena de rango dinámico considerable destinada a convertirse en una imagen en BN, realizaré 3 tomas con trípode ahorquilladas: -2EV, 0EV, +2EV. La toma 0EV sería la exposición idónea de compromiso que tomaríamos ante esta escena cuyo rango dinámico excede el del sensor BN básico, y será por tanto la captura de referencia para modelar dicho sensor. Las tomas a -2EV y +2EV serán las que usemos para modelar respectivamente los sensores parciales de altas luces y de sombras del sensor BN HDR.
- Las 3 tomas anteriores se revelan linealmente y de forma neutra con DCRAW. El único procesado que realizaremos será la aplicación de una rutina para convertir las mismas en BN igualando sus tres canales a la luminosidad según el criterio CCIR de video: Y = 0,299R + 0,587G + 0,114B.
- La imagen así obtenida de la captura a 0EV constituirá directamente la imagen final para el sensor BN básico.
- Pero para el sensor BN HDR debemos generar las tomas parciales que habríamos obtenido de los dos juegos de fotocaptores del mismo. Mediante una rutina se descartarán en la toma -2EV los píxels que ocupen las posiciones marcadas en blanco en el esquema del sensor propuesto. Del mismo modo en la toma +2EV se desecharán los píxels marcados en gris en el mismo esquema.
- A continuación se procederá en ambas tomas diezmadas a la mitad de píxels, a interpolar en cada una por separado los valores que habían sido desechados. El algoritmo de interpolación empleado no puede ser más simple: promedio aritmético de los 4 valores circundantes conocidos de cada píxel, y es por tanto muy mejorable pero para la prueba lo considero suficiente.
Fig. 5 Interpolación sensor de altas luces (toma -2EV).
Fig. 6 Interpolación sensor de sombras (toma +2EV). - Las dos imágenes resultantes serán fusionadas en una imagen final para el sensor BN HDR con un algoritmo tan simple como tomar de la captura a +2EV todos los píxels que estén suficientemente alejados de la saturación, acudiendo para los píxels más próximos a saturarse en dicha toma a la captura a -2EV.
- Finalmente se comparará la calidad de las dos imágenes finales contrastando recortes en lugares clave de las altas luces, los tonos medios y las sombras de la escena.
Sin embargo, asimilado este hecho, la comparación entre los resultados de los dos esquemas bajo prueba es totalmente representativa per se para discernir si uno de los dos presenta ventajas decisivas o no respecto al otro.
ESCENA Y SIMULACIONES DE SENSORES BN
La escena consiste en el siguiente bodegón de gran rango dinámico:

Fig. 7 Escena de alto rango dinámico de prueba.
Tras realizar todos los pasos indicados comparamos la imagen resultante del procesado según el sensor BN básico que no requiere interpolación con la resultante de la fusión de las dos imágenes interpoladas para el sensor BN HDR en zonas de diferente luminosidad de la escena:
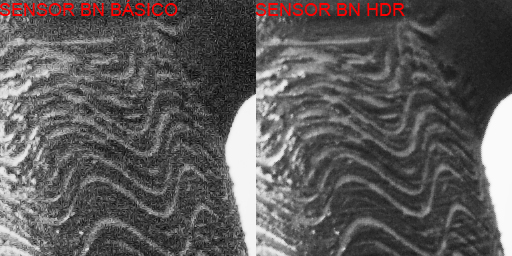
Fig. 8 Recorte 100% comparativa de sombras.
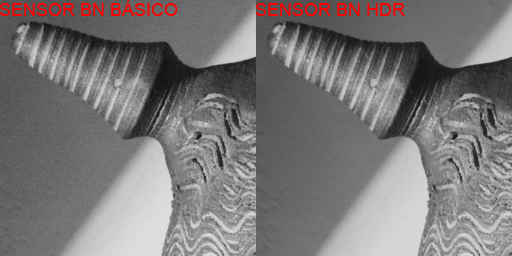
Fig. 9 Recorte 50% comparativa de tonos medios.
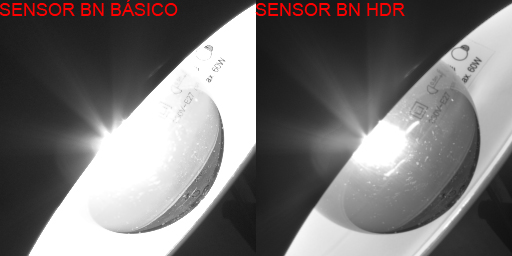
Fig. 10 Recorte 50% comparativa de altas luces.
La gran mejora en cuanto al ruido y textura en las sombras, y de las altas luces que se han podido preservar eran de esperar pues es bien conocida en este sentido la potencia de la combinación de imágenes de diferente exposición.
Quedaba sin embargo más duda sobre lo que ocurriría en los tonos medios, donde el ruido ya no será un problema grave para ninguno de los dos sensores y en cambio pudiera observarse un deterioro de la nitidez en el sensor HDR debido a la interpolación. Aparentemente no ha sido así, no se observa menoscabo en la calidad de los detalles debido a la interpolación. La mejora en ruido sigue siendo notoria pese a que ya es aceptablemente bajo en los dos sensores.
Veamos un recorte al 100% de una zona con un detalle más fino, la inscripción en la lámpara. Y lo comparamos no solo con el resultado para el sensor BN básico sino también con la toma Bayer original hecha a -2EV ya que al ser una zona de altas luces el sensor BN básico ya daba síntomas de saturación:
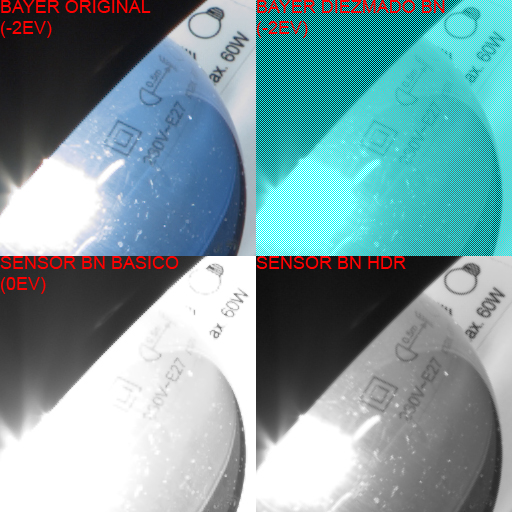
Fig. 11 Recortes 100% para analizar la pérdida de nitidez por interpolación.
La segunda imagen con esa tonalidad azulada no es sino la toma realizada a -2EV en la que han sido descartados la mitad de los píxels marcándolos a tal efecto en color cyan. Esto sería un recorte con mayor grado de zoom de la zona de la etiqueta:
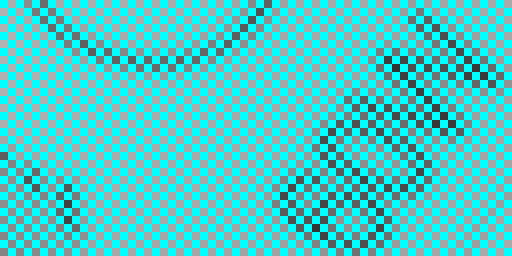
Fig. 12 Recorte 800% imagen diezmada para modelar sensor de altas luces (toma -2EV).
Y por supuesto la cuarta imagen de ese grupo no es sino esta misma donde cada píxel cyan ha sido sustituido por un nivel igual al promedio de los 4 niveles de grises que presentan los píxels que lo rodean, y combinada con la interpolación equivalente realizada en la toma +2EV que con toda probabilidad aporta la zona de sombras.
En la inscripción de la lámpara (ver especialmente la etiqueta "60W") sí que puede verse un deterioro en la nitidez final al aplicar la interpolación, tanto respecto a la imagen del sensor BN básico (se aprecia pese a estar ésta a punto de quemarse) como por supuesto respecto a la toma Bayer original menos expuesta.
Para analizar más en detalle este deterioro de nitidez comparamos ahora la imagen interpolada del sensor BN HDR con la toma original -2EV convertida a BN pero antes de proceder al diezmado (la llamo "captado" pero es entre comillas pues en realidad proviene de una interpolación Bayer previa):
Fig. 13 Recorte 600% imagen BN sin diezmado (toma -2EV) vs imagen interpolada sensor BN HDR.
Ahora puede verse con claridad como el algoritmo de interpolación usado pasa serios apuros para mantener la nitidez en zonas de alto detalle y contraste como son estas inscripciones textuales. El promediado en muchos casos se contamina de píxels más claros a los propios de la inscripción de modo que los píxels interpolados que caen dentro de las etiquetas escritas aparecen en tonos grises más claros a los esperados dando lugar a una desestructuración del trazo.
La simplicidad del algoritmo (un simple promediado) tiene la culpa. Sería interesante repetir la comparación con algoritmos de interpolación más sofisticados tales como los que se aplicaron a los archivos RAW del sensor Bayer para generar la primera imagen pues el sensor Bayer ha de lidiar con este mismo tipo de problemas a la hora de interpolar áreas con detalle.
Por desgracia no dispongo del código ni conocimientos para implementarlos así que habrá que hacer un acto de fe y pensar que un algoritmo más adecuado nos proporcionaría una considerable mejora en la calidad de la interpolación en estas zonas de máximo detalle.
Los buenos resultados obtenidos con sensores que requieren interpolaciones todavía más complejas como el Super CCD de Fuji así como las muy diferentes calidades de la interpolación Bayer en función de los algoritmos usados hacen pensar que así debe ser.
RESULTADO FINAL
Al margen de los problemas que plantea la interpolación en las zonas de detalles con alto contraste, veamos el aspecto final de la escena convertida en BN.
La conversión a BN por mezcla de canales según la norma CCIR ha producido un BN de buena calidad. La filosofía de doble sensor ha hecho el resto, permitiendo una mayor preservación de las altas luces a la vez que unas sombras prácticamente libres de ruido:

Fig. 14 Aspecto final de la imagen BN obtenida con el sensor BN HDR.
Para el que desee hacer pruebas de BN sobre la misma escena dejo aquí para la descarga el archivo RAW SensorBN.cr2 correspondiente a la captura de exposición 0EV. Es fácil comprobar que no es posible obtener en una sola toma el mismo resultado que habríamos obtenido con un sensor de características como el propuesto.
CONSIDERACIONES SOBRE EMPLEO DE FILTROS
Hasta ahora hemos visto que los esquemas propuestos carecen de todo tipo de filtrado en el sensor o bien éste sería pancromático (filtros neutros), afectando de manera uniforme a toda la banda de frecuencias.Sin embargo para obtener un BN adecuado es preciso un filtrado cromático de la imagen, que de preponderancia a ciertas zonas del espectro. Elegir cuáles, vendrá determinado por el tipo de escena y las intenciones del fotógrafo. En ese sentido una cámara de este tipo daría más trabajo en un principio para el fotógrafo, hasta que éste y la configuración del equipo estuvieran en sintonía.
Pero una vez el autor hubiera dado con los filtrados que necesita para cada ocasión este hecho dejaría de ser un problema, y la calidad resultante sería superior a la de cualquier tipo de microfiltros colocados sobre el sensor.
Otro aspecto a considerar es la necesidad o no de los consabidos filtros IR y antialiasing:
- Ignoro si en un sensor de este tipo el no filtrado de la radiación infrarroja se haría necesario para no introducir efectos indeseados en el resultado. Si así fuera no se podría prescindir de él obviamente como en cualquier cámara Bayer.
- Pero el filtro antialising, al menos en el esquema que no requiere interpolación, sí que sería probablemente prescindible eliminando ese efecto de filtrado paso bajo que resta nitidez a las imágenes.
CONCLUSIONES
Se han analizado los porqués del interés de que exista un sensor dedicado exclusivamente a la fotografía en BN, estilo para el que no está diseñada ni optimizada una topología de sensor color de Bayer.Se han propuesto dos diferentes filosofías de sensor monocromo, uno sin filtros sobre ninguno de sus fotocaptores y que como ventaja tiene que no necesita de interpolación alguna, y otro por el que apostamos basado en un sensor con microfiltros neutros sobre la mitad de sus captores para obtener una gran mejora en rango dinámico, a cambio de una posible pérdida de nitidez en las texturas así como una mayor complejidad de procesado.
Las pruebas realizadas muestran que es beneficioso de cara al resultado final adoptar la segunda filosofía. El hardware requerido (microfiltros neutros) será obviamente algo más complejo, y el diseño del software de revelado también; pero la mejora resultante bien vale la pena resultando las complejidades añadidas transparentes al usuario.
Aunque no lo hemos podido probar, la pérdida de nitidez observada en zonas con mucho detalle y contraste elevado puede con toda certeza optimizarse mucho empleando algoritmos de interpolación más adecuados. Ya se logra tal cosa en otras interpolaciones que se enfrentan a problemas similares como la de Bayer por ejemplo.
Una cámara de este tipo requeriría tener una selección de filtros sobre la lente para moldear el tipo de BN finalmente deseado. Este inconveniente sería con seguridad aceptado por el tipo de usuario al que fuera dirigido una cámara con un tipo de sensor tan específico.
Como comentario personal diré que si existiera una cámara que incorporara un sensor de este tipo especializado únicamente en BN, por concepto creo que sería una opción a tener muy en cuenta por el simple hecho de tener la certeza de tener entre manos un equipo que ha sido específicamente diseñado para darme la máxima calidad en BN.
Si este contenido te ha resultado útil, considera realizar una contribución para asegurar la continuidad de esta web. Mantenerla supone un importante esfuerzo, así como un espacio y ancho de banda considerables en el servidor. Es una operación sencilla y totalmente segura.
gluijk@hotmail.com